![]()
![]()
複数台制御ライブラリ「Open-RMF」によるROS2の自律移動ライブラリ「Navigation2」制御と、産業用ネットワーク「PLC」の制御の研究
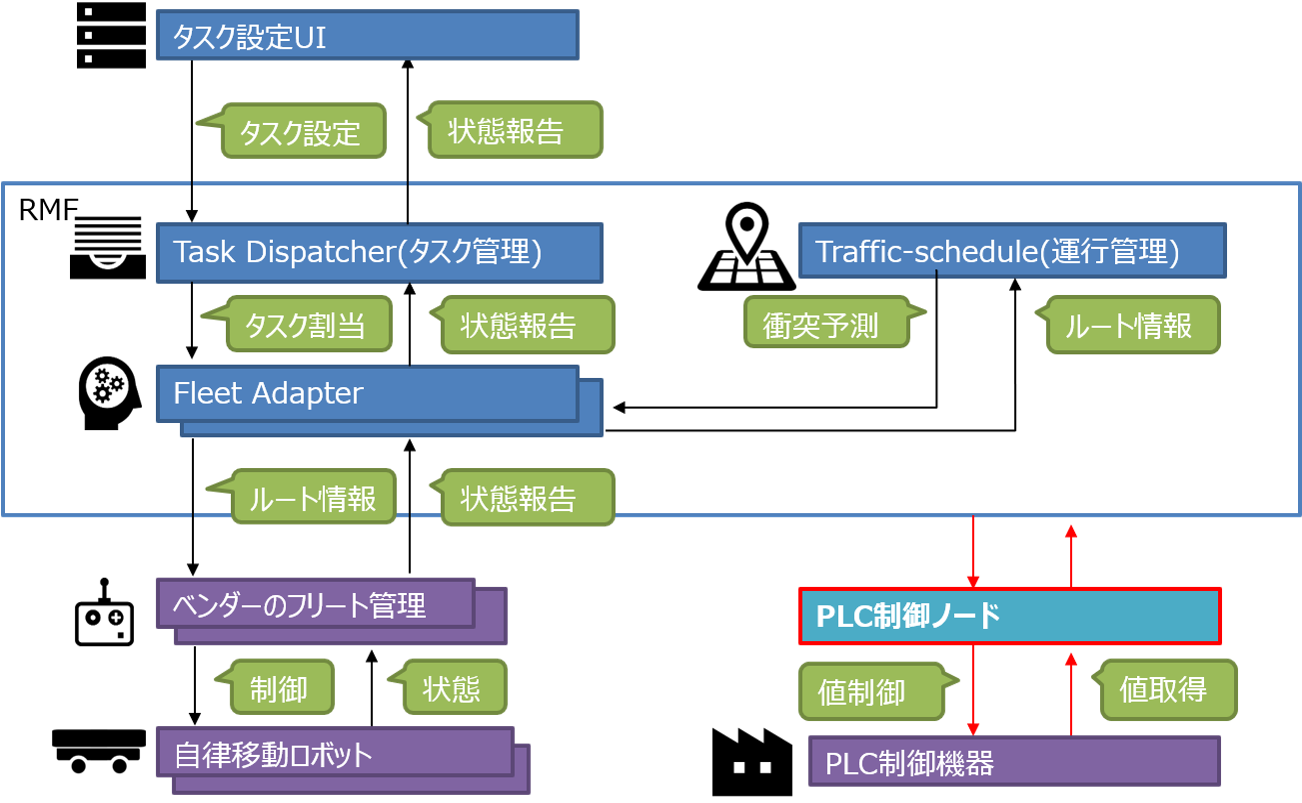
本研究では、オープンソースの複数制御フレームワーク「Open-RMF」(以下、RMF)を用いて、Factory Automationで用いられている通信規格「PLC(Programmable Logic Controller)」とROSの連携を検証しています。
現代において複数のロボットを扱うことが一般的になり、衝突回避や作業効率向上のために情報を一元的に管理・制御する必要が高くなってきました。RMFを使用することで、ROS/2や制御APIを保有するロボットと接続し、個々のロボットの運行管理や効率的な経路生成が可能になります。
検証には、シミュレーションツール「Gazebo」を使用し、自律移動ライブラリ「Navigation2」で複数のロボットを制御しながら、シミュレーション上の機器制御にソフトウェアPLCの値参照、制御をしています。本研究により、複数のロボットを使用するプラント内物流や生産ラインの効率化に貢献できることが期待されます。上流システムであるWMS・MESとの連携については現在研究中です。
ROSとROS2開発はぜひ、
富士ソフトにご用命ください!