![]()
![]()
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)のロボット活用型市場化
プロジェクトに提案を行い、ロボットのプラットフォーム化技術開発(ハードウェア)を実施
※採用されている技術は、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)の委託業務の成果として得られたものです。
ロボット未活用領域に対してロボット導入を促進のため、再利用性を高めたロボットシステムの構築を行った。
本ロボットシステムの開発では、複数の6軸多関節ロボットを協調して作業させる。
また製造ラインの変更に対するシステムの再利用を容易にする。
そのために以下の4つの取り組みを行った。
(1) ハードウェアプラットフォームのオープン化
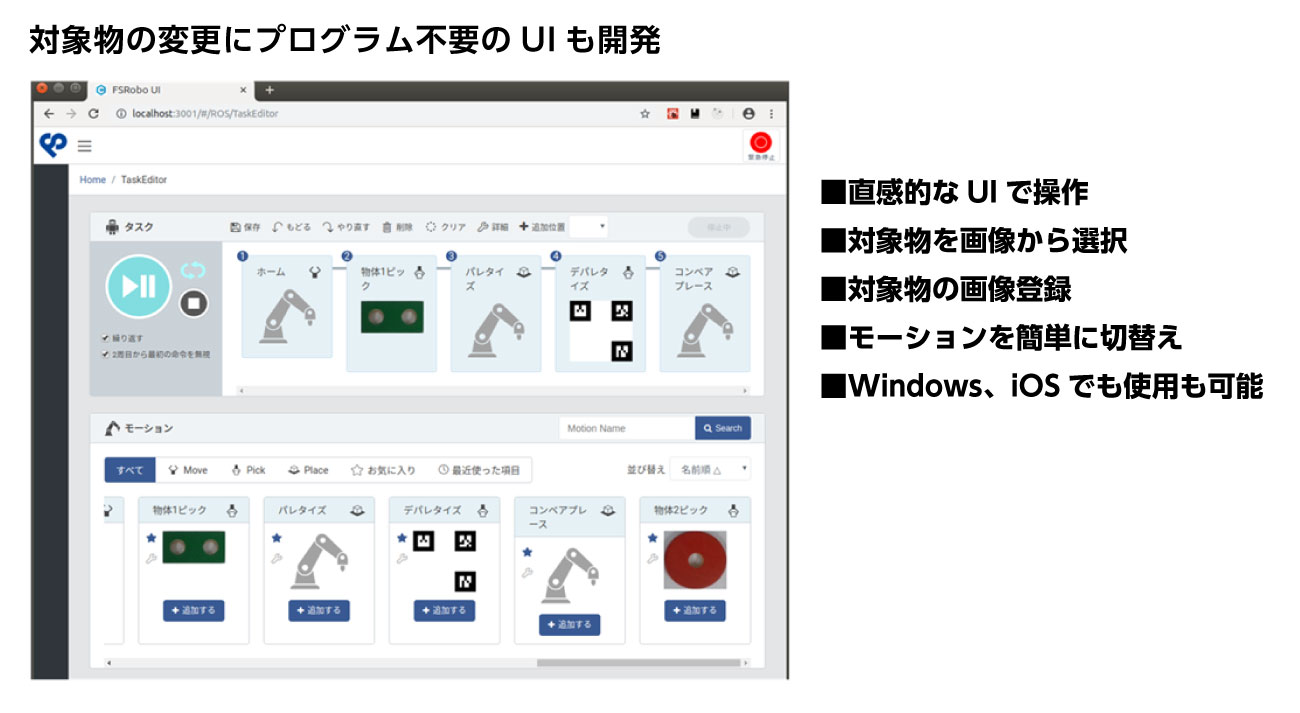
(2) ロボット操作の簡単化
(3) 他社ロボットや周辺機器との協調制御の実現
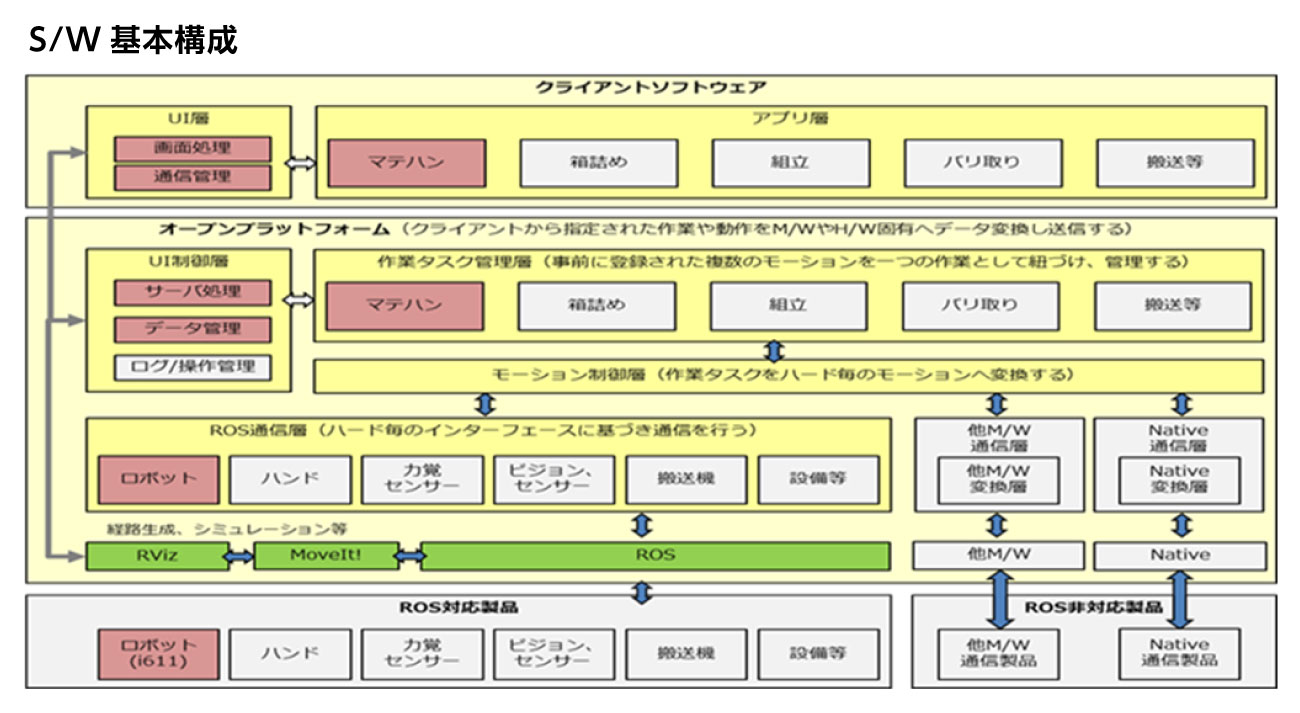
「「ROSを使用したP/Fを開発し、マテハンのフィールドに適用しました」とし、ROSを使用したP/Fを開発したことで
①ROSに対応した機器(YOODS、RealSense、COBOTTA)と連携することができます。
②障害物を事前登録することで障害物を回避する経路生成を自動で行うため、ティーチング量を減少させることができます。
③P/Fをpython言語で構築しているため、AIモジュールとの連携も簡単にできます。」

ROS開発はぜひ、
富士ソフトにご用命ください!