ALL JAPAN
ROBOT-SUMO TOURNAMENT
全日本ロボット相撲大会
お電話・FAXでもお問い合わせを受け付けています
 050-3000-2763
050-3000-2763
受付時間 月~金 9:00~17:30
 045-650-8810
045-650-8810
受付時間 24時間受付
お電話・FAXでもお問い合わせを受け付けています
受付時間 月~金 9:00~17:30
受付時間 24時間受付
自立型ではフライングの発生を軽減するために、スタートモジュールを導入しています。
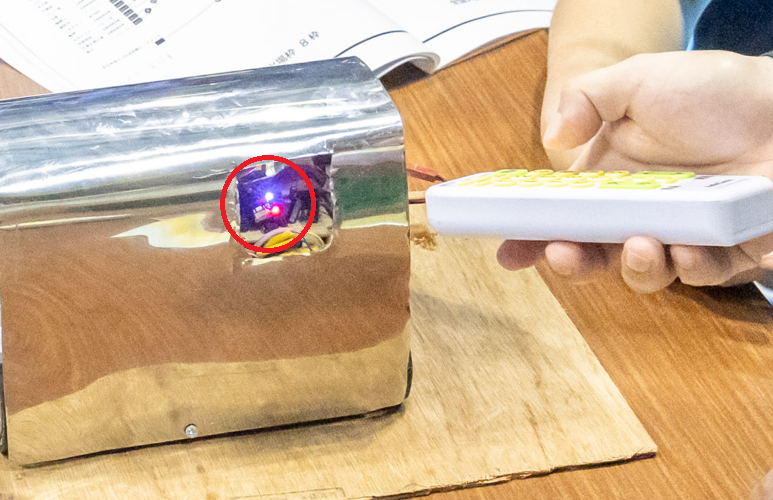
試合開始時に審判員が専用リモコン(送信機)から赤外線のスタート信号を発信し、それぞれのロボットがスタートモジュール(受信機)で受信します。
スタート信号は審判員の専用リモコンからのみ発信でき、選手のリモコンは、ロボットを停止する時のみ使用できます。
ロボットは、スタートモジュールを実装し、ロボットの動きを遠隔操作で開始/停止させる機能が必要です。
スタートモジュールによって、ロボットを3つの状態で動作させます。
① Ready(受信準備完了)
② Start(スタート信号発信)
③ Stop(停止信号発信)

スタートモジュール(JSUMO社)
ロボットは、スタート信号を受け取った時のみ動き、それ以外の時は停止していなければなりません。
スタートモジュールは、一連のモード(Ready ⇒ Start ⇒ Stop)の信号を受信すると動作しないように作られています。再起動するには、ロボットの電子回路を再起動し、スタートモジュールを再起動する必要があります。
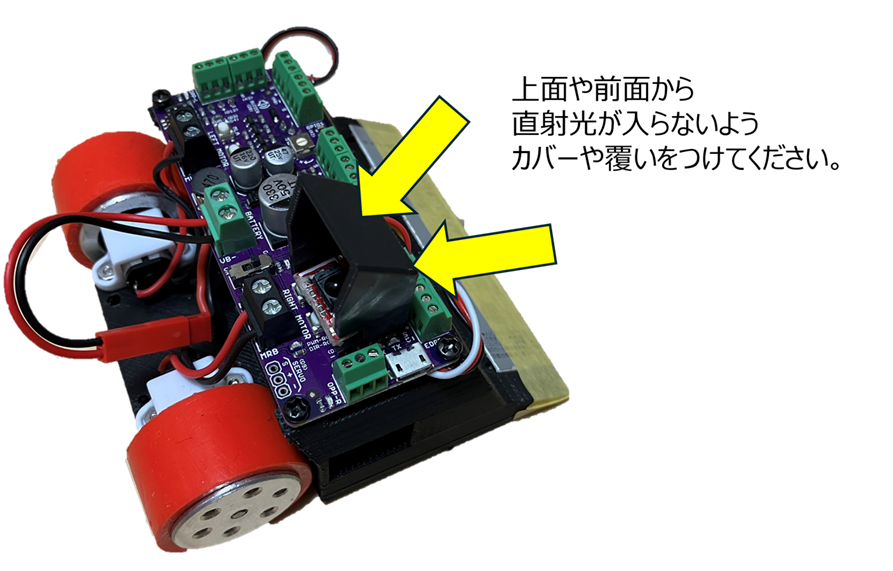
スタートモジュールはロボットの上部に設置し、赤外線受光部が信号受信の妨げにならず、破損時に交換しやすい場所に設置する必要があります。
スタートモジュールは赤外線を使用するため、照明や相手ロボットのセンサー光により正常に動作しない場合があります。
取付位置を工夫し、カバーを取り付けるなど周囲から遮光できるように製作をお願いします。
スタートモジュールは、自作またはJSUMO社製品が使用可能です。
スタートモジュールへの信号発信は、ソニー社のリモコンが使用可能です。
赤外線(IR LED)の仕様 波長 950nm
変調周波数 40kHz
1/3duty
スタートモジュールの実装
大会で使用するリモコンのボタン設定は以下の通りです。
全日本の部 1-Ready
2-Start
3-Stop
高校の部 4-Ready
5-Start
6-Stop
予備設定 7-Ready
8-Start
9-Stop
スタートモジュール/リモコンの設定
リモコンを赤外線受光部に近づけすぎると誤動作する場合があります。誤動作する場合は1m以上離れて操作してください。
また、設定ミス防止のため、信号の入力は、キーをしっかり押し込むようにゆっくり行ってください。
リモコンのボタン設定に合わせて、スタートモジュールにレディ信号、スタート信号、ストップ信号を記録します。
① 記録モード 白いボタンを押す。(LEDが3回点滅)
② リモコンのReadyボタンを押す。スタートモジュールにレディ信号を記録
③ リモコンのStartボタンを押す。スタートモジュールにスタート信号を記録
④ リモコンのStopボタンを押す。スタートモジュールにストップ信号を記録
⑤ 信号の記録を保存する。(LEDが4回高速点滅し、赤、青LEDが消灯)
⑥ スタートモジュールのフラッシュメモリに記録される
※スタートモジュールの詳細については、こちらをご覧ください。
自立型の試合の流れは以下の通りです。
① 審判員の指示により、操作員および補助員に土俵入りする。
スタートモジュールは試合前にルール通り設定されていること。
② 操作員または補助員がロボットを余地の所定の場所に置いた後、審判員の合図で一礼し、ロボットの準備を行う。
③ 審判員の指示により、選手はロボットを土俵上に自身の仕切り位置へ相手選手と同時に置く。
※仕切り後のプログラム変更はできません。
審判の許可なく、仕切り後に停止・設定装置等に触れた場合は、警告や反則となる場合があります。
④ 審判員の指示により、操作員および補助員は余地に戻り、操作員はリピートガンを手に取る。
大会中はリモコンの赤外線信号を正しくロボットへ伝えるために、事務局で用意したリピーターを使用する。
⑤ 両者の準備ができたら、審判員がReadyボタンを1~2回押し、LEDの点灯を確認する。
ロボットが信号を正しく受信した場合、操作員は手を上げ、審判員は目視で確認する。
※仕切り後に腕や旗等が倒れた場合は、その場で再度セットできます。
ただし、ロボットのセットにより仕切り位置が動いたと審判が判断した場合は、仕切り直しを指示する場合があります。
⑥ 審判員が「はっけよいのこった」の掛け声の後にStartボタンを押すことにより、ロボットが同時に動き出す。
⑦ 試合終了または審判員の試合中止の指示と共に、審判がStopボタンを押し、ロボットを直ちに停止させる。
審判員がロボットを停止できない場合は、操作員または補助員がリモコンを使ってロボットを停止できる。
⑧ 審判員がロボットが停止し安全であることを確認する。指示が出たら、ロボットを回収する。
⑨ ロボットとプロポを余地の所定の位置に置いた後、審判の試合結果と合図を聞いて、一礼し退場する。


自立型の試合開始
ラジコン型の試合開始時は、カウントダウンタイマーを使い、カウントダウンしてスタートする方式を使用しています。
カウントダウンタイマーは、スタート3秒前から1秒おきに短いビープ音を発し、3秒経過した際に長いビープ音により、ロボットの操作員へ試合開始を合図します。
カウントダウンタイマーの動作は以下の動画でご確認ください。
※音は変更されることがあります。
ラジコン型の試合開始の流れは以下の通りです。
① 審判員が、操作員および補助員に土俵入りを指示する。
② 操作員または補助員がロボットを余地の所定の場所に置いた後、審判員の合図で一礼し、ロボットの準備を行う。
③ 審判員の指示により、選手はロボットを土俵上の自身の仕切り位置に相手選手と同時に置く。
※仕切り後のロボットの設定変更はできません。
審判の許可なく、仕切り後にロボットの設定変更等を行った場合、プロポに触れた場合は、警告や反則となる場合があります。
④ 審判員は選手に操作位置へ戻り、プロポーショナル・システム(プロポ)を取るように指示する。
※仕切り後に腕や旗等が倒れた場合は、その場で再度セットできます。
ただし、ロボットのセットにより仕切り位置が動いたと審判が判断した場合は、仕切り直しを指示する場合があります。
⑤ 審判員は選手に対戦開始の準備を確認し、「はっけよーい、のこった!」の掛け声とともにカウントダウンタイマーを開始する。
⑥ カウントダウン音(ピッピッピッピー)が鳴り、3秒後のピープ音(ピー)の後、操作員はプロポでロボットを操作し、試合を開始する。
※フライングは2本で相手の1本となります。音をよく聞いてスタートしてください。
⑦ 試合終了または審判員の試合中止の指示とともに、プロポの操作を中断しロボットを停止させる。
⑧ 審判員がロボットが停止し安全であることを確認する。指示が出たら、ロボットを回収する。
⑨ ロボットとプロポを余地の所定の位置に置いた後、審判の試合結果と合図を聞いて、一礼し退場する。

ラジコン型の試合開始