

- 事業紹介
- 製品・サービス

-
- システム開発から探す
- ソリューションから探す
- ソリューションから探す
- スマートファクトリーソリューション
- モバイルソリューション
- 教育ソリューション
- クラウドインテグレーションサービス
- 組み込み系テクノロジー
- バーチャルシミュレーション(CarMaker)
- Bittware社 FPGAボード, アクセラレーションカード
- Hitech Global社 FPGAボード
- System On Chip社 IPコア、FPGAボード(H.264/265 4K/8K)
- NORTWEST LOGIC社 IPコア(PCIe, MiPi)
- Mixel社 IPコア(PHY)
- Stereo Vision IP Suite
- AUTOSAR開発体験キット
- 日本語入力システム FSKAREN
- Androidソリューション・Androidアプリ開発
- FSEmbedded/Linux Service
- 組み込みDB MISSION
- リファクタリングサービス
- AUTOSAR開発ソリューション
- ROS開発/ROS2開発支援サービス
- ロボットシミュレータ構築支援サービス
- セキュリティソリューション
- ITコンサルティングサービス
- 金融業界向けサービス
- AIソリューション
- RPAソリューション
- 働き方改革ソリューション
- テレワークソリューション
- 知能化技術ソリューション
- ネットビジネスソリューション
- リテールソリューション
- デジタルリビングソリューション
- インフラソリューション
- FujiFastener
- Product-10
- - VMware Tanzu
- - VMware Workspace ONE
- - Azure Virtual Desktop
- - Tenable.io
- - VMware Carbon Black
- - VMware NSX® Advanced Load Balancer™
- - VMware SD-WAN™ by Velocloud®
- - CloudHealth® by VMware
- - Azure Stack HCI
- - Rubrik
- Google Cloud
- アマゾン ウェブ サービス(AWS)
- 仮想化ソリューション
- VMCマネージドサービス
- BigFix
- 富士ソフト5G
- その他のソリューション
- Jira Service Management
- intra-mart
- AgileWorks
- 無人受付システム moreReception
- ポケトーク
- 基幹業務ソリューション
- SAP バージョンアップソリューション
- 仮想化ソリューション
- PEGA(BPMパッケージ)
- スケジュール・タスク管理アプリ「Refills」
- Notes / Dominoサービス
- 環境情報見える化ソリューション FSGreen EMS
- 独立行政法人向け 業務管理ソリューション
- SMAPS(SMSソリューション)
- オラクルサービス
- Oracle Cloud CX
- 法人様向けPCレンタルサービス
- UXP
- Shadow Desktop
- パソコンの導入
- GIGAスクール対応 キッティングサービス
- BizDevOps
- 業務プロセス自動化サービス Workato
- アキバプラザ
- 業種から探す
- 業務から探す
- 注目サービスから探す
- 注目サービスから探す
- FujiFastener
- DX LABO AKIHABARA
- FAMoffice
- Desktop Full Service(デスクトップフルサービス)
- みらいスクールステーション
- みらいスクールプラットフォーム
- プロロ
- +F FS030W
- コミュニケーションパートナーロボット PALRO(パルロ)
- ITコンサルティングサービス
- サービスデザイン、UI/UXデザイン
- ペーパーレスシステム moreNOTE
- Riviiv 「ランサムウェア対策のマネージドバックアップサービス」
- 日本語入力システム FSKAREN
- アキバプラザ
- 秋葉原ショールーム
- 富士ソフトアカデミー
- らくらくアップグレード
- GIGAスクール対応 キッティングサービス
- 課題から探す
- 導入事例を見る
- 導入事例
- イベント・
セミナー - 会社情報
- 決算関連情報
- サステナ
ビリティ - 採用


ニュース
2020年3月17日
4K定点カメラ映像による工事進捗管理システムを開発
~映像の3D化と建機検出AIにより工事進捗を見える化し、生産性向上を実現~
|
富士ソフト株式会社(本社:神奈川県横浜市、代表取締役 社長執行役員:坂下智保)、安藤ハザマ(本社:東京都港区、社長:福富正人)、日本マルチメディア・イクイップメント株式会社(本社:東京都千代田区、代表取締役:高田守康)、計測ネットサービス株式会社(本社:東京都北区、代表取締役:佐藤哲郎)および宮城大学(キャンパス:宮城県大和町、事業構想学群教授:蒔苗耕司)で構成する映像進捗管理システム開発コンソーシアムは、建設現場の進捗管理を効率的に行うための「定点カメラ映像による進捗管理システム」を開発しました。 2020年1月から現場※1での本格的な試行を開始しており、現場技術者が効率的な施工管理を実施することができ、建設現場の生産性を向上させることが確認されました。 本コンソーシアムは、内閣府の官民研究開発投資拡大プログラム(PRISM)※2の枠組みを活用した国土交通省の「建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト」に選定されています。 |
※1 試行現場
岩手県発注 二級河川大槌川筋大槌の1地区ほか河川災害復旧(23災617号及び622号)水門土木工事
(工期:2014年3月~2021年3月) https://wwb.jp/ootutisuimon/
※2 官民研究開発投資拡大プログラム(PRISM) https://www8.cao.go.jp/cstp/prism/index.html
2016年12月に総合科学技術・イノベーション会議と経済財政諮問会議が合同で取りまとめた「科学技術イノベーション官民投資拡大イニシアティブ」に基づき、600兆円経済の実現に向けた最大のエンジンである科学技術イノベーションの創出に向け、官民の研究開発投資の拡大等を目指し2018年度に創設された制度のこと。
(PRISMはPublic/Private R&D Investment Strategic Expansion PrograMの略)
| 1.開発の背景 建設現場では、効率的な進捗管理に向けて工事の施工状況を定点カメラで常時モニタし、現場事務所等の遠隔地から映像を通して現場状況の確認等を行う事例が増えています。一方、映像の情報だけでは、工事の進捗状況を把握するうえで下記のような課題がありました。 ① 工事の完成形状に対する進捗状況が直感的に分かりにくい ② 施工量(盛土量等)や距離・面積などの定量的な情報が取得しづらい ③ 稼働しているダンプや建機の台数などの常に変化する情報を素早く把握できない 2.定点カメラ映像による進捗管理システム 本システムに実装した主な機能は以下のとおりです。上記の課題を解決するとともに、施工者だけでなく発注者も自由に本システムの映像を確認することができるため、受発注者双方で情報を共有することができます。 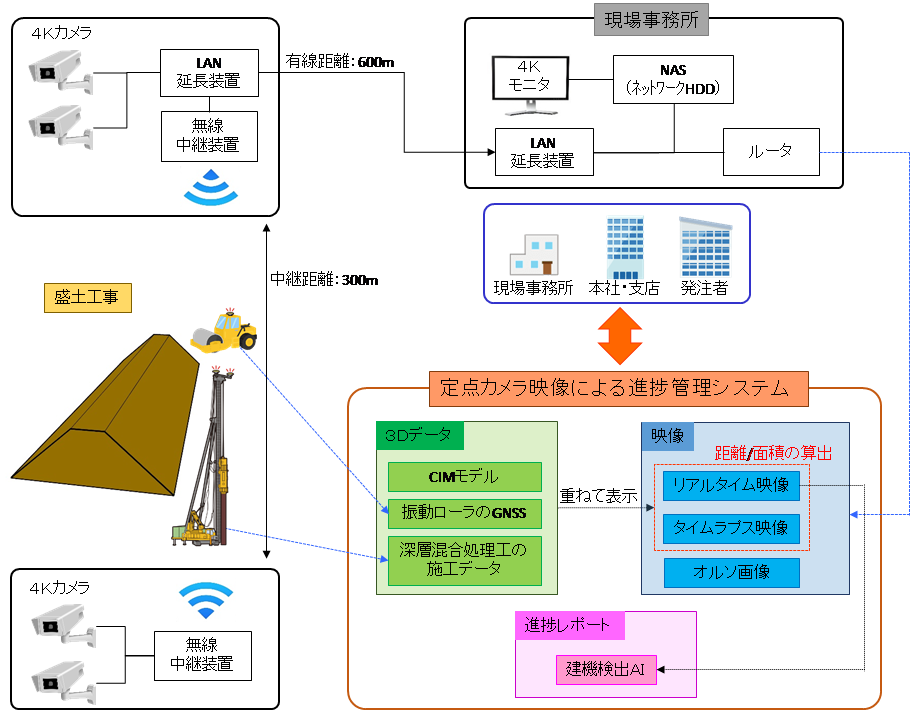 図1 システム構成図
(1) 映像に3Dデータを重ねて表示 現場に設置した4K解像度の定点カメラによるリアルタイムな映像を瞬時に疑似的な3D映像に変換して、CIMモデル※3、振動ローラのGNSS※4データおよび深層混合処理工の施工データ※5を重ねて表示します。これにより、工事の完成形に対する進捗状況が直感的に分かりやすくなります(図2)。 また、半日分の施工量(盛土の定量的な情報)とその施工範囲が映像上に表示されるため、進捗管理および次工程の施工計画立案に活用できます(図3)。  図2 システム画面(CIMモデルの重ね合わせ表示)
※工事の進捗がCIMモデル(1m毎の等高線)に対して、予定通り進行しているかを確認  図3 システム画面(振動ローラのGNSSデータの重ね合わせ表示)
※昼の打合せ時に午前中の盛土の施工範囲とその施工量を確認 ※3 CIM(Construction Information Modeling)モデル コンピュータ上で設計された3次元モデル。3次元形状情報に加え、材料・部材の仕様、コスト情報等の属性情報を併せ持った情報モデル。 ※4 GNSS(Global Navigation Satellite Systems) 汎地球測位航法衛星システム。衛星を用いた測位システムの総称。 ※5 深層混合処理工の施工データ 地盤改良や杭工事での電流値やスラリー量等の施工情報を可視化することができる杭・地盤改良施工情報可視化システム「3Dパイルビューアー」から取得した3Dデータ。 (2) 映像から距離や面積の算出 パソコンの画面上を直接タッチすることで、映像上の任意地点の距離や面積を瞬時に算出できます。日々の出来高管理や資機材の配置計画といった簡易的な測量が画面上で可能になります(図4)。  図4 システム画面(資材ヤードを想定した面積の算出)
(3) 建機検出AIによる進捗レポート AIによる建機の識別では、ダンプ、バックホウ、ブルドーザおよび振動ローラを識別対象として、その識別結果(図5)を進捗レポート(図6)で表示します。例えば、進捗レポートにはダンプの計画運搬台数に対する実績が30分毎の時系列グラフで表示されるため、施工途中での予実管理が可能になり、ダンプの滞留状況などの通常とは異なる傾向を早期に発見し、原因を分析することができます。 なお、4Kカメラの活用により、カメラからの距離が150mの場合、80%程度の識別率を確保できることを確認しています。 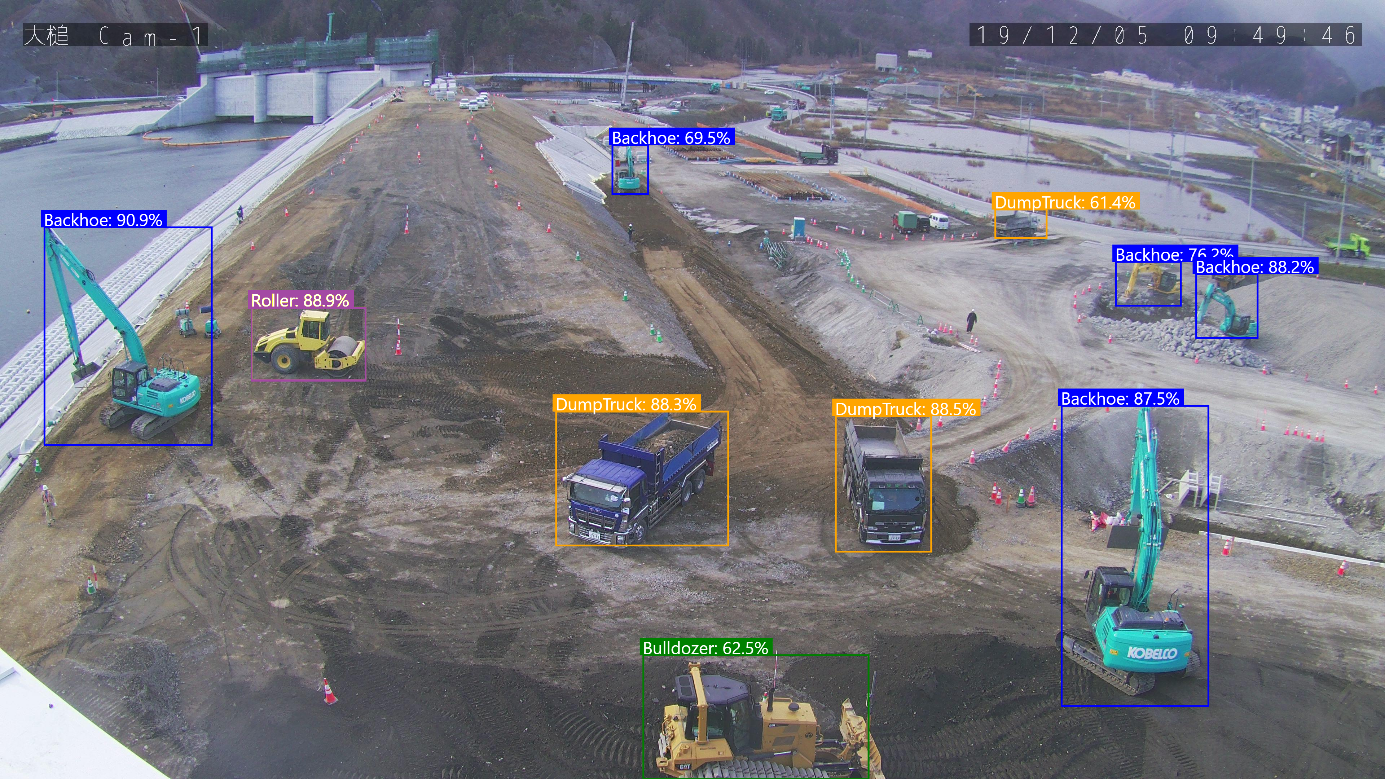 図5 AIによるダンプおよび建機の識別結果(概ね80%の識別率)
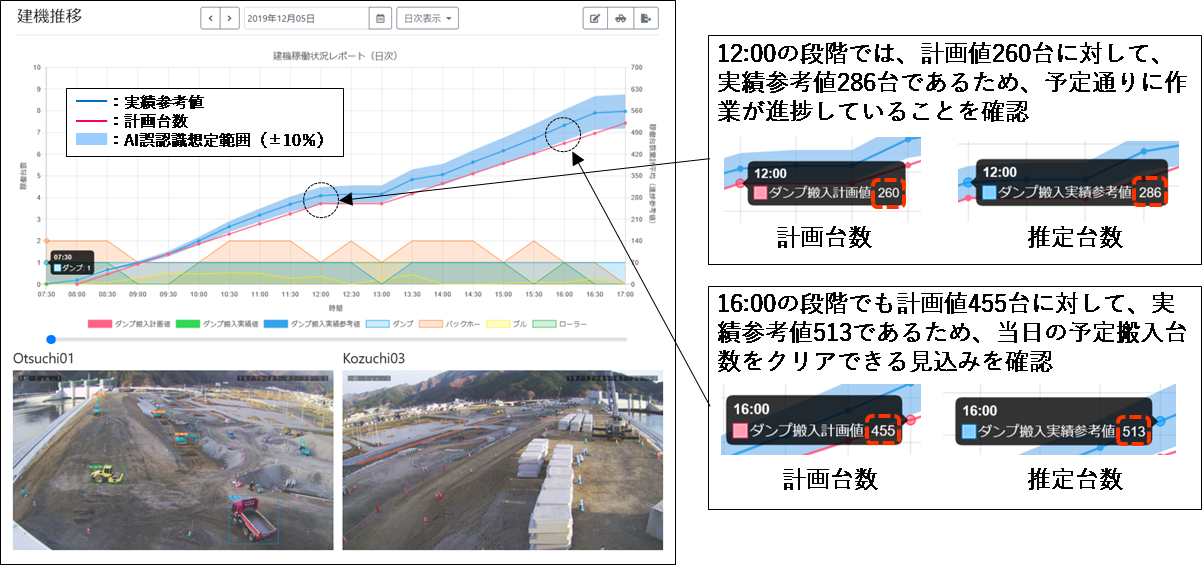 図6 建機検出AIによる進捗レポート
(4) オルソ画像の作成 現場を囲うように高所に設置した4台のカメラ映像を写真測量の原理により結合させて、あたかも現場上空から撮影したような画像(オルソ画像)を作成し、現場状況の進捗確認や施工計画の立案に活用します(図7)。 画像は本コンソーシアムのウェブサイト(注5)にも掲載しており、地域住民の方が工事の進捗状況を自由に閲覧することができます。 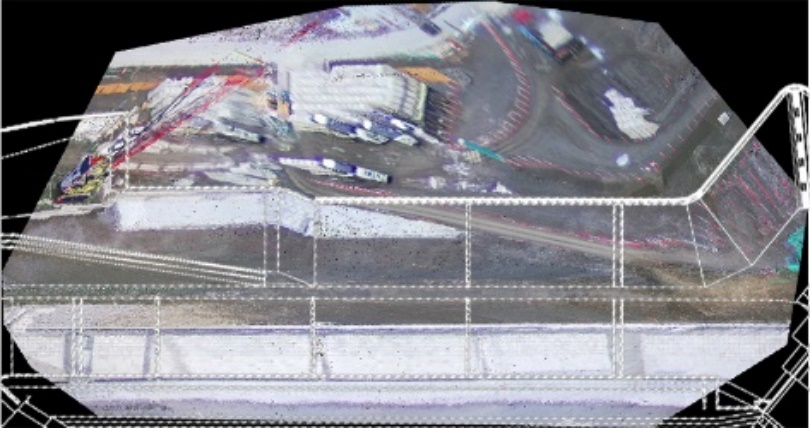 図7:オルソ画像(設計データを重ね合わせて表示)
3.本システム適用の効果 事務所のパソコンから現場の状況や工事の進捗をリアルタイムに把握できるため、現場技術者が工事の進捗状況を確認するため現場に立ち会う回数や時間が削減されました。ダンプ運搬の時系列グラフにより、ダンプの滞留状況などの傾向を把握し、その原因を分析できるようになりました。また、パソコン画面上で現場の距離や面積が算出できるため、簡易な測量作業の代替となり、現場技術者が行っていた測量の作業時間も大幅に削減することができました。 上記の効果を積み重ねることにより、アイドルタイムが減少し、現場技術者が他の業務に注力することのできる時間が増え、建設現場の生産性が向上することが確認されました。 4.今後の展開 本システムは、盛土などの土工工事ほど導入効果が大きいと判断して本現場での検証を進めていますが、今後はダムや処分場の工事などへも展開し、現場管理のムダ・ムラの早期発見、是正を図り、建設現場のさらなる生産性向上に取り組んでいきます。 |
【映像進捗管理システム開発コンソーシアム】 https://otsuchi-prism.jp/
●各社の役割
| 企業 | 役割分担 |
| 安藤ハザマ http://www.ad-hzm.co.jp/ |
・技術開発の全体総括 ・現場運用の総括 ・データの効果検証 |
| 富士ソフト株式会社 https://www.fsi.co.jp/ |
・建機のAI自動認識技術 |
| 日本マルチメディア・イクイップメント株式会社 http://jmenet.com/ |
・映像進捗管理システムの構築 ・カメラ等の設備 |
| 計測ネットサービス株式会社 https://www.keisokunet.com/ |
・深層混合処理データの表示システム構築 |
| 公立大学法人 宮城大学 https://www.myu.ac.jp/ |
・映像処理やデータ活用に関する技術開発の総括管理 |
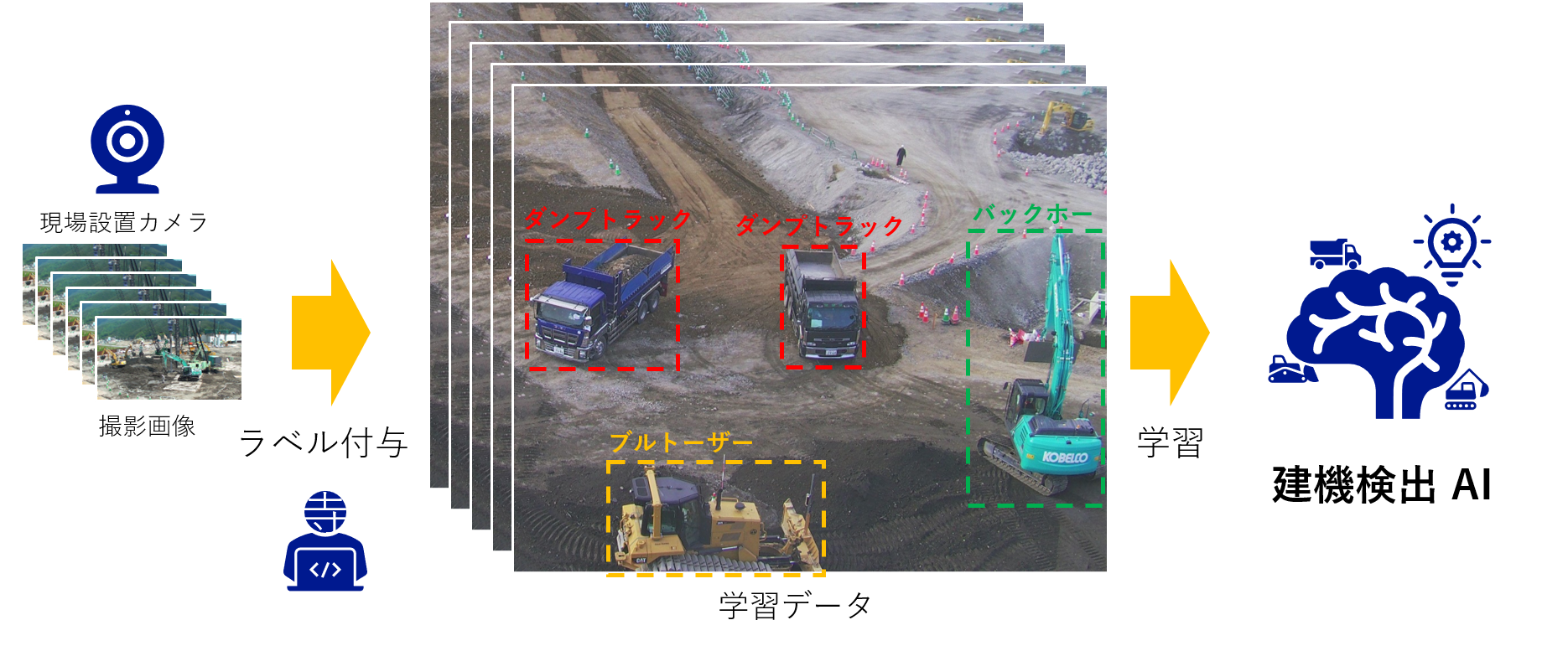
●建機のAI自動認識技術について(富士ソフト担当)
① 現場の撮影画像を用意し、その画像の中の建機にラベル付けを行います。
② ラベル付けした画像を機械学習させることで、建機検出AIを生成します。
③ 実際の運用では、生成した建機検出AIで、実際の現場撮影画像から建機を検出、識別します。(図5参照)
④ 識別結果を集計し、建機台数推移レポートを作成します。(図6参照)
【富士ソフトのソリューション】
●AIソリューション https://www.fsi.co.jp/solution/AIsolution/index.html
お客様の持つ様々な課題・求められるニーズに富士ソフトは最先端の「AI」を駆使し経営的観点、ビジネス的観点、技術的観点からAIをインテグレーション、お客様に最適なサービスを提供いたします。
●Azure AI Cognitive Services 導入支援サービス https://www.fsi-ms-solution.jp/azure/cognitive-services/
AI コンピューティングで視覚、音声、言語を実現し、サービスとして提供される Azure Cognitive Services を利用することにより、画像認識、音声認識、自然言語理解、翻訳といったインテリジェントな機能を活用したソリューション開発を支援します。
以上
この件に関するお問い合わせ
●ニュースリリースについて |
●技術開発について |
![]()
- サイトのご利用について
- ソーシャルメディアガイドライン
- サイトマップ
- ©1994 FUJISOFT INCORPORATED